Vecteur vitesse de rotation
Définition :
Soit deux bases \(b_0(\vec {x_0}, \vec {y_0}, \vec {z_0})\) et \(b_1(\vec {x_1}, \vec {y_1}, \vec {z_1})\), où \(b_1\) est déduite de \(b_0\) par rotation d'un angle \(\alpha\) autour de \(\vec {z_{0,1}}\).
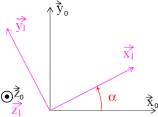
On appelle vecteur (vitesse de) rotation de \(1\) par rapport à \(0\) le vecteur suivant :
\[\overrightarrow{\Omega(1/0)} = \dot{\alpha} \ \overrightarrow{z_{0,1}}\]